






Bilateral Hand Rehabilitation Apparatus V2
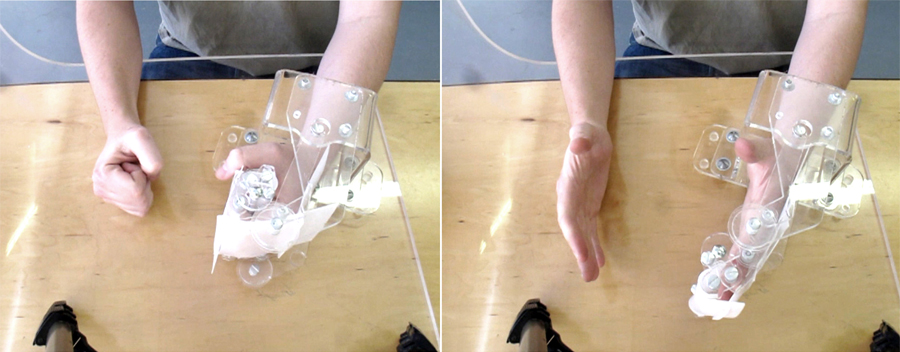
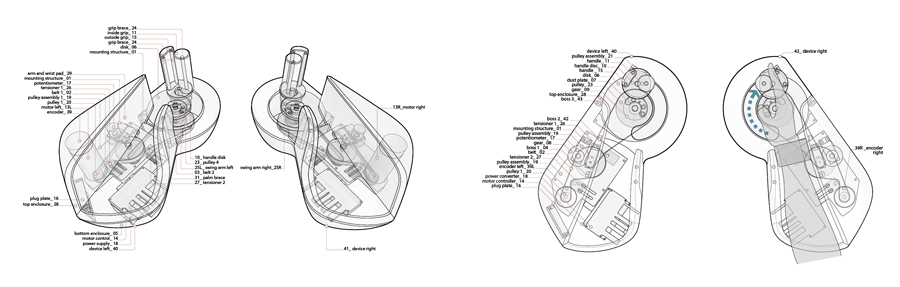
In an effort to further simplify and streamline the interaction between the user and the apparatus, Radlab was commissioned to build a bilateral hand rehabilitation system that would eliminate device hierarchy and create a more balanced sense of mirrored motion. Version 2 is comprised of a clearly defined left and right hand device, either of which may be used to initiate motion. The control algorithm operates in two different modes: bidirectional or unidirectional. In this context, bidirectional means that either hand can operate as master or slave. As one hand initiates motion, the other follows, and the hierarchical relationship between each hand can switch back and forth in real time per the user’s initiative. The apparatus, in this case, behaves as if a torsion spring were connected between the two pivot points on the swing-arms in each of the devices. A restoring force, proportional to the difference in angle between the two hands is applied to each, driving them towards one another. Unidirectional, in this context, means that one hand is prescribed as the master hand for the duration of each exercise regimen. Therefore the opposing, slave hand, always follows the motion of the master. Either of these two modes may be selected through the software’s user interface on the computer.
Status: Completed, 2012
Client: Novokinetics, LLC
Location: Memphis, TN
Patent Pending
Project Team
Matt Trimble, Radlab
Garett Hwang, Radlab
Esko Heilner, Radlab
Jared Steinmark, Radlab
Haik Tokatlyan, Radlab
John McBean, Xitome
Kailas Narendran, Xitome